ok I should have my parts back from the waterjet guy sometime tomorrow. (crosses fingers)
if I do I'll post up some yummy pics as son as I get it all :D

Printable View
ok I should have my parts back from the waterjet guy sometime tomorrow. (crosses fingers)
if I do I'll post up some yummy pics as son as I get it all :D
alright I got word that after a few mechanical breakdowns my stuff is done!! I'll be picking it up later on this afternoon. Pics to follow
Schaweeeeeet! So hurry up with the pics already!
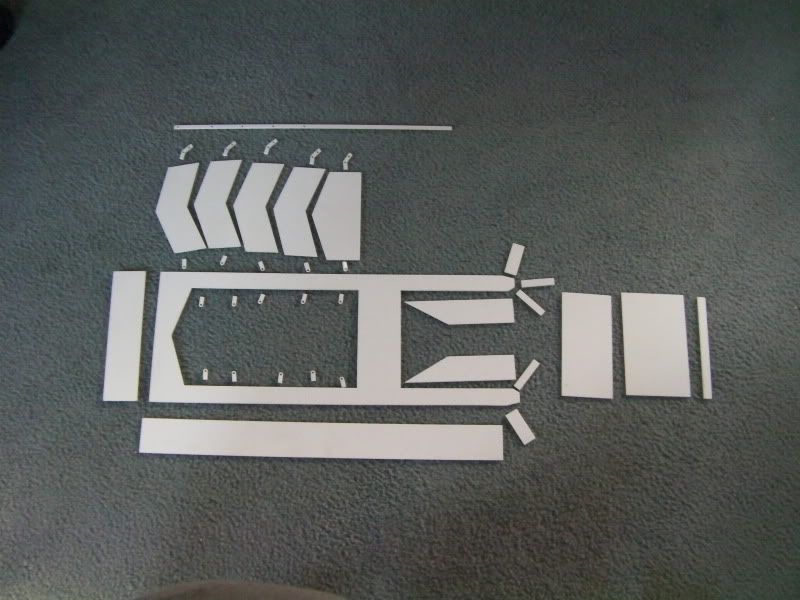
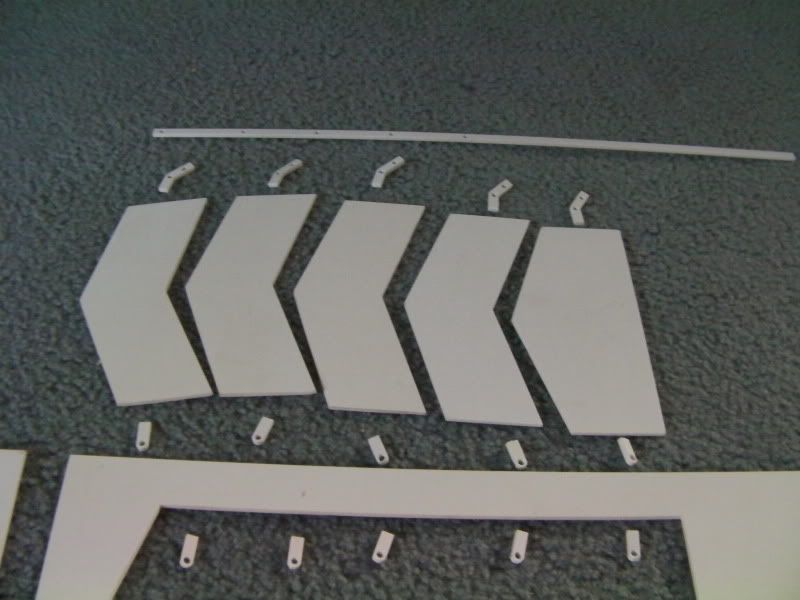
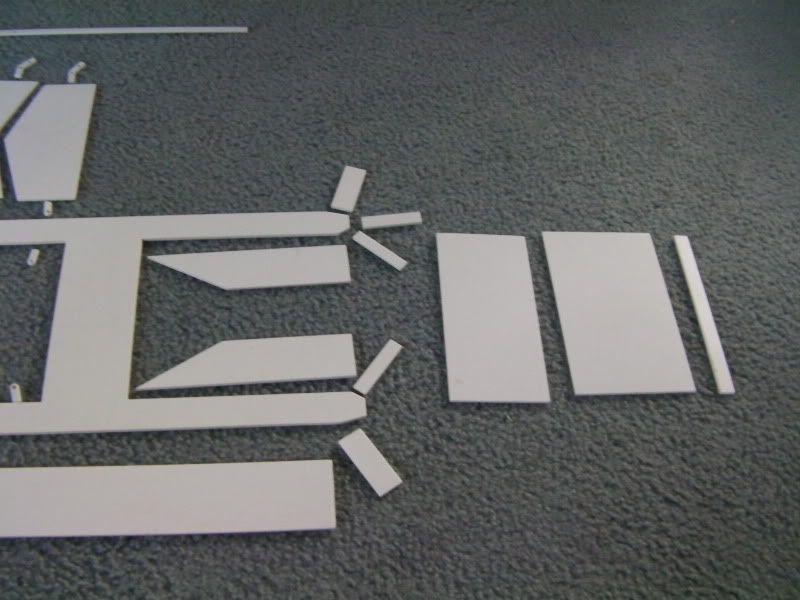
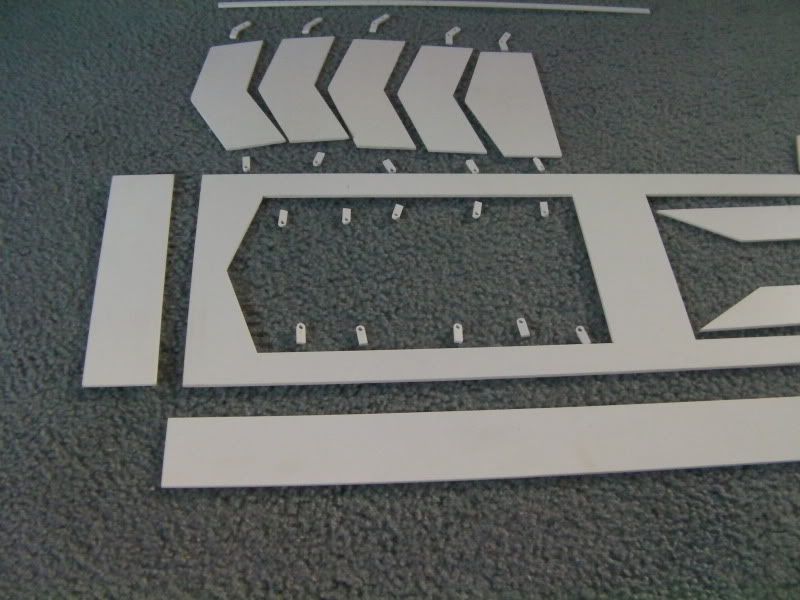
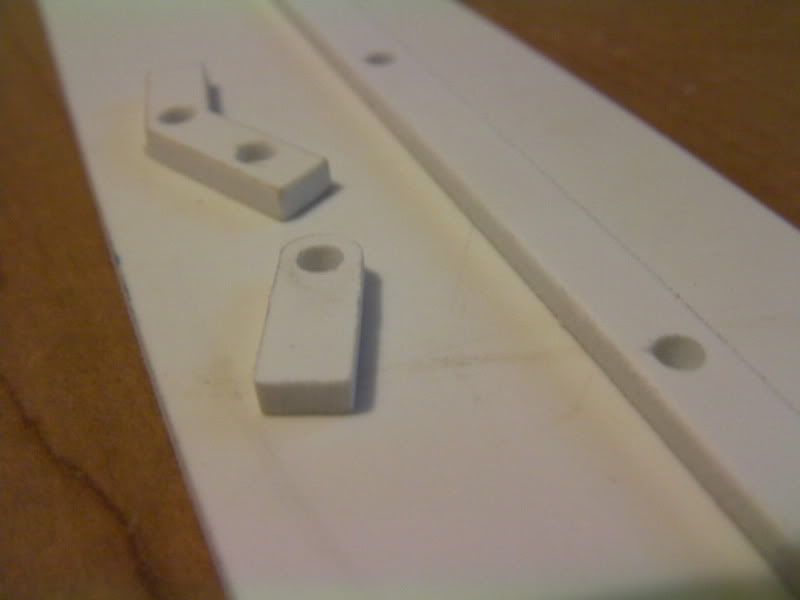
here ya go :D click for bigger pics
He forgot to make 3 pieces though, which he said he'll do in the morning. So once again, a HUGE thanks to Tom over @ HydroCutter for doing this for me!!!
Everything fits a little tight, but that's perfect. The edges are almost perfect and will only require a little bit of sanding, but that will smooth them and make everything fit perfectly. Then once it's all glued together I'll bondo it up and sand it so it looks nice. I'll get some close-up pics of the edges tomorrow.
the holes in the mounting tabs are 1/8" and the space between the hole and the edge is 1/16". Not bad for 60,000 psi of water traveling over 1,700mph!
now I've got plenty of clear 1/8" acrylic rod left from rockin case, so I will use that for the hinges. hopefully this week I can get some work done on this and more work done on the LEDs as well
Awesome. I can't wait to see those louvers together and working. :twisted:
here's a few close-ups of the edges. they're pretty damn smooth for such a soft material. there's a slight bit of browning on some of the edges, but that was to be expected. it's not deformed at all and will be easily hidden with bondo and paint or sanded away altogether.
the pics came out ok, I need to get or make a nice photo box setup to get better lighting though
Awesome!! Those came out very nice. I cant wait to see them assembled and in action.
Very nice! I've found that a florescent lamp with a sheet of white paper taped over it works as a good quick light box.
thanks! I'll have to give that a shot! +repQuote:
Originally Posted by x88x
Update time!!!
After about an hour of sanding on the fins i got them all to fit in perfectly
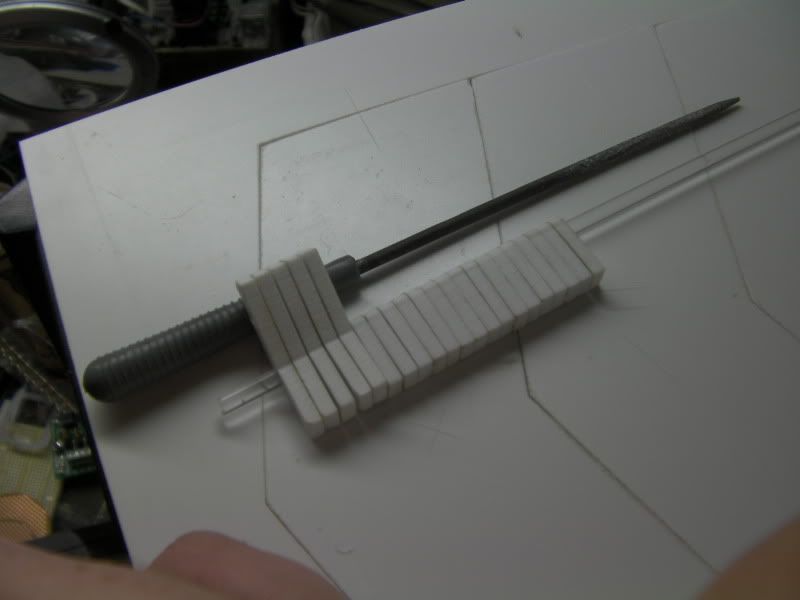
I then took all my hinge pieces and filed out the holes until the acrylic rod slid in easily, then stacked them all up to sand down the mating surfaces
after they were all sanded I laid them out in their places
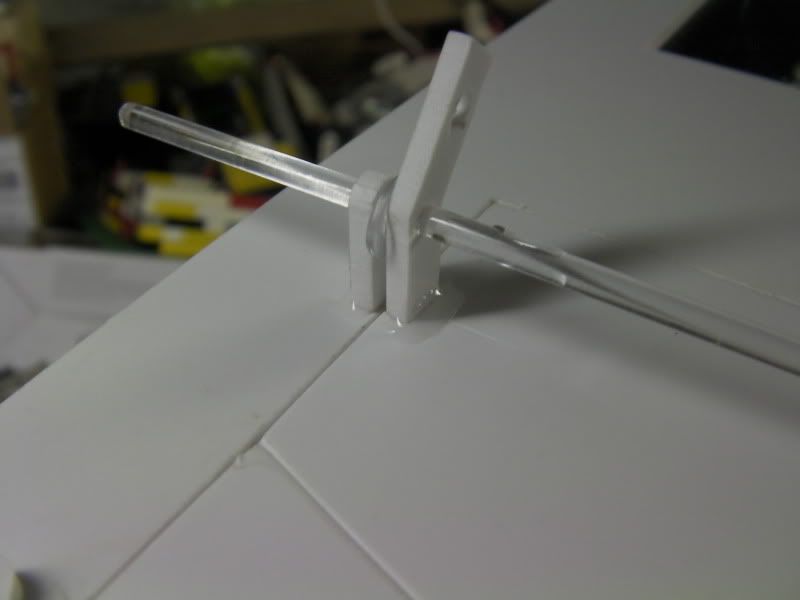
I ran a piece of rod through 4 of the mounts so it would keep them properly aligned. I measured 1" from each fin edge (the middle of each fin) and scribed a line to mark where each piece was to line up.
Then I used some ultra thick CA glue with a 10-25 sec. set time and glued the parts in their places
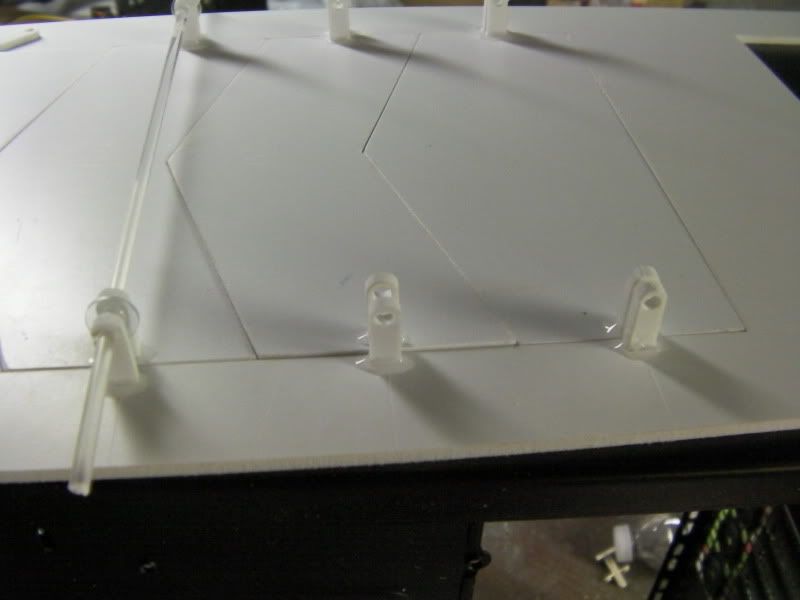
3 sets done
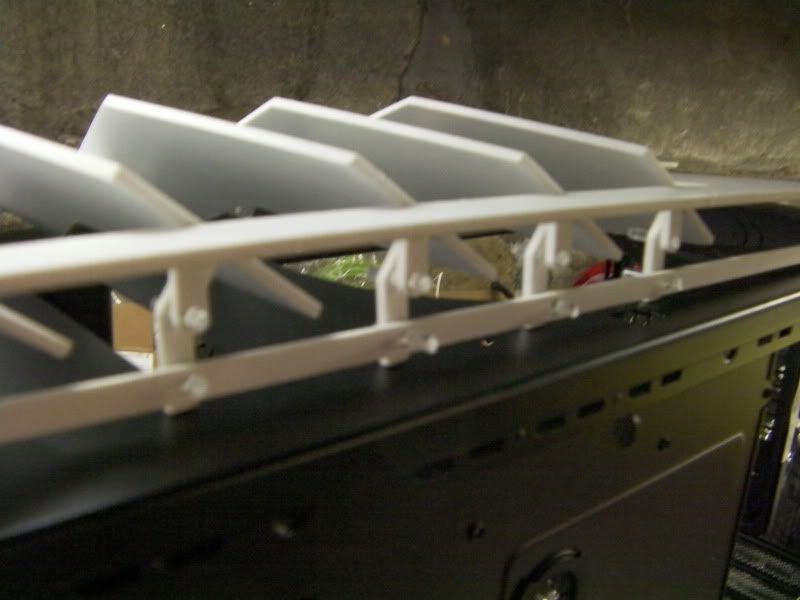
All 5 sets done. This took quite a while to get right, as I needed to nudge each part gently to get it to properly line up, then glue with one hand while holding everything steady with the other. I set the actuating rod in place to help line up the 5 actuating arms, and put 15 temporary pins in to hold everything together.
Opened
I used painter's tape to hold the 3 edges on so I could sit the unit on the case over the fans and check clearances.
Louvers closed
And opened
Now I've got a bunch of sanding and filing to do on the edges of the louvers so they all open and close smoothly. Currently in the closed position they catch on each other when trying to open, so I'll probably end up beveling the edges to loosen it all up. If it doesn't work well enough I'll probably have another set of mounts cut out and put the new mounts farther to the rear of the louvers to change the pivot point. We'll see what happens though. Hopefully within the next few days I can get them all sanded and check clearances.
I'm also going to cut some small ledges to glue to the bottom backside of the louvers, so when they're closed they'll sit perfectly flush
Niiiice. That's gonna look awesome once it's hooked up. :D
Looking awesome! I showed this to one of my contacts and lets just say they like it!
I'm gonna have to learn how to make something like that. I already have a plan for it too :whistler:
sweet work on the case so far!
Thanks :D I just need to figure out where I'm going to mount the servo then make some mounts for it and it'll be pretty much ready to go! There will just be a nice bondo coat to fill in the gaps and then some black spray paint to cover it all up. I'm just not sure @ this point if I want to do gloss black or matte black...maybe I'll paint one louver in each and see how they look with the rest of the case.Quote:
Originally Posted by x88x
Thanks CJ! :up:Quote:
Originally Posted by Oneslowz28
It's easy really. I designed it all in sketchup then added all the measurements and printed out the drawings and handed them to Tom @ HydroCutter and said make me this :DQuote:
Originally Posted by StormRider
Ok well it was a little more involved and time consuming than that lol, but it did go together quicker tonight than I thought it was going to, so I'm pumped :D
yes, in fact you can. Provided you have a Tempest or Tempest EVO case (from what I've seen the top panel is pretty much the same between them). Tom saved all the needed AutoCad files to cut them again, and I've got enough styrene to cut out at least 5 or 6 more full sets. If anyone's interested in a set for their case (Tempest/EVO) let me know, I can make the magic happen :DQuote:
Originally Posted by x88x
All you'd need is the arduino (sensor shield not needed, just makes all the connections easier), a micro servo, and the code for it is here! (once again a HUGE thanks to crenn for helping me with the coding!!)
:eek: Farging AWESOME!!!!!!! That is sooooooo damn cool. 8) +rep for sure
I want to see this in action! I'm also curious the radius of the arm (from pivot to connector) for each panel and the radius of the servo.... just curious!
Also you're welcome for the code, didn't take too long to write up and hopefully will work exactly how you want it to!
Thanks!!!Quote:
Originally Posted by msmrx57
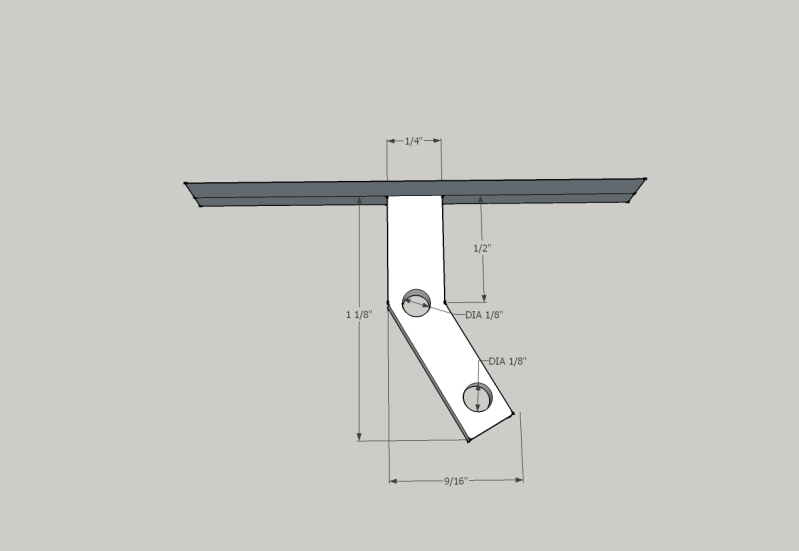
Not sure exactly what you want for measurements. I think this is what you were asking for. It's all the dimensions for the actuator arms. I can't seem to find out how to make sketchup show angles like the rest of the measurements though, but the angle is 30º. The smaller pieces are the same but without the extra arm coming off. Hope this helps :DQuote:
Originally Posted by crenn
:EDIT: upon further research it would appear that SketchUp does NOT DO ANGLE MEASUREMENTS like it does the other length measurements. Seems to be a rather important thing they left out. However you can jsut use th eprotractor to find the angle and make some text pointing to it with the angle I suppose :think:
oh and it's 1/2" center to center on the holes
What's the radius of the servo arm?
EDIT: If you've got MSN/WML can you PM me your address that you use?
that I don't know off the top of my head, but I'll be home for lunch in ~ 3.5hrs so I'll find out then. I may not even use that servo arm. I may cut a piece of styrene to attatch to that arm for more throw if needed. I don't see that servo having any trouble moving these louvers, it's got plenty of power and they more very easily.
This is the servo I got, but I got different arms with it
I don't use MSN/WML, sorry :facepalm:
crenn, the servo arm measures 5/8" from center of mounting hole the the outermost mounting hole
Smallish update!
I did all the needed sanding to get the fins to not catch on each other anymore, they all open and close smoothly now. I also added small tabs to the bottom of each one so they will only close until they're flush and won't more any farther. This will also alleviate any play in the linkage that might keep one fin open a crack while the others are closed.
I also finished gluing all the mounts. Now I'll just have to do some finish sanding on the glue and finish sanding with higher grits on the fins to take out the scratches before everything gets painted.
Hopefully this weekend I'll get to finish all the mounts permanently with the acrylic pins glued into place, and get the servo mounts made and the servo mounted. That's all for now!
Wow, this project just fuels my love of moving parts! Long live mechanical motion, down with the boring solid state! I'll take the linkage on a six-pack carb setup over electronically-controlled fuel injection any day. Cases just don't have enough $#!t that moves. :D
Just outstanding work, +rep!!
lol thanks!!
Update time!
The original actuator arm I had made broke because I made the walls around the holes too thin. So I cut a piece and made myself a new one
Then the 3rd side was glued on
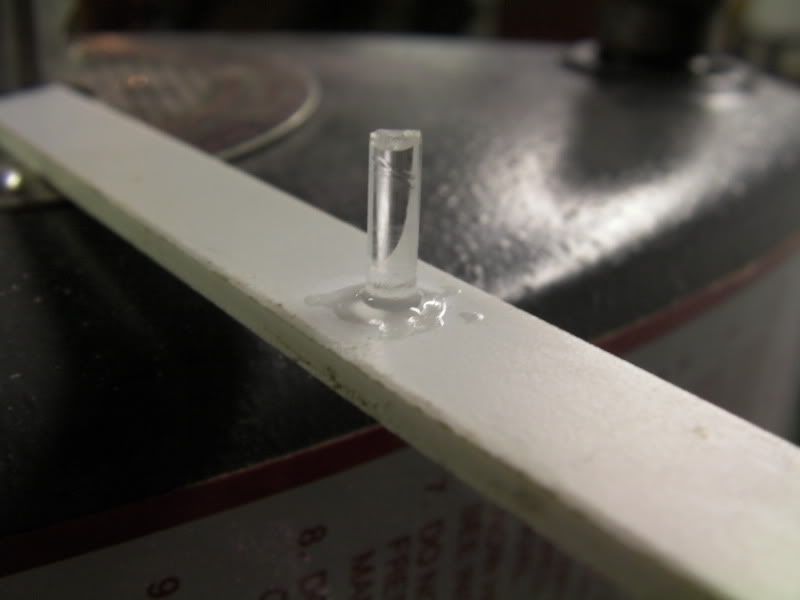
The 1/8" acrylic rod pieces were glued into their respective holes in the actuator arm
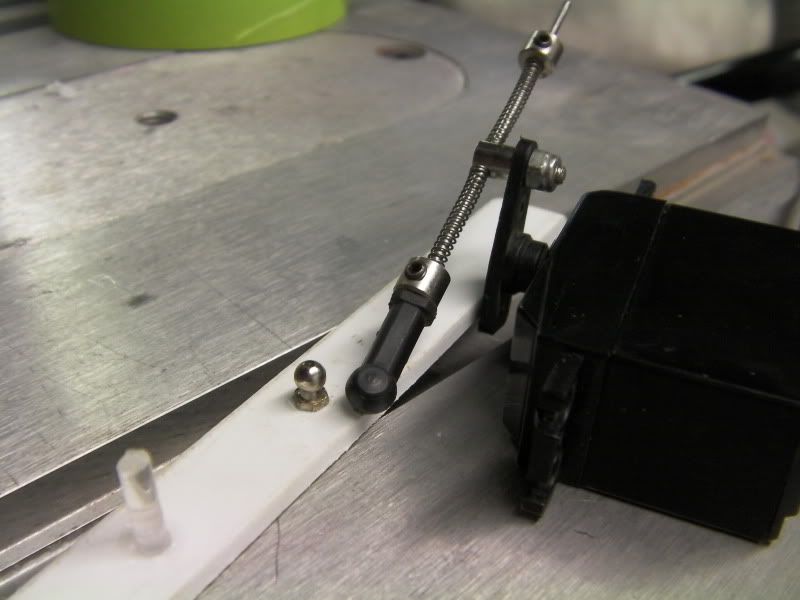
I drilled a small hole to thread in this ball stud
Now I had to swap out my micro servo for this standard one because the linkage I wanted to use was too big for the small arm on the micro servo
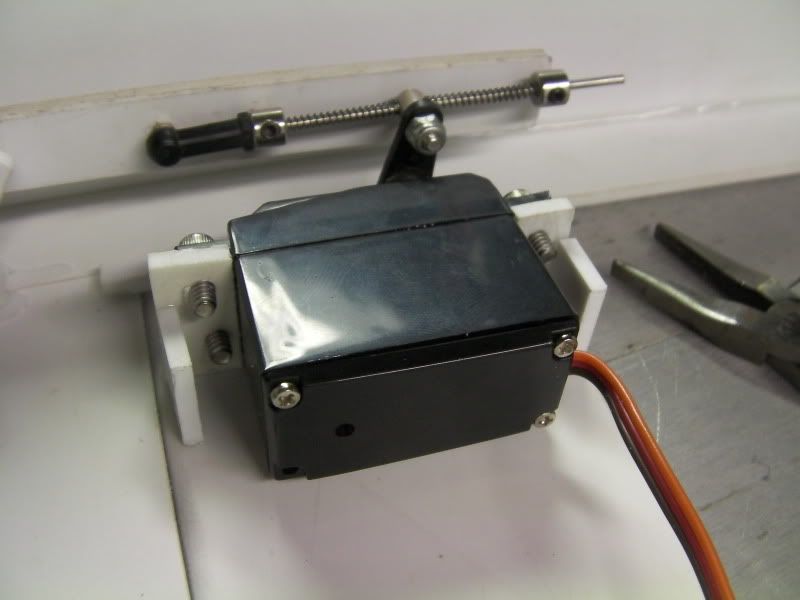
I made some servo mounts
And all glued up
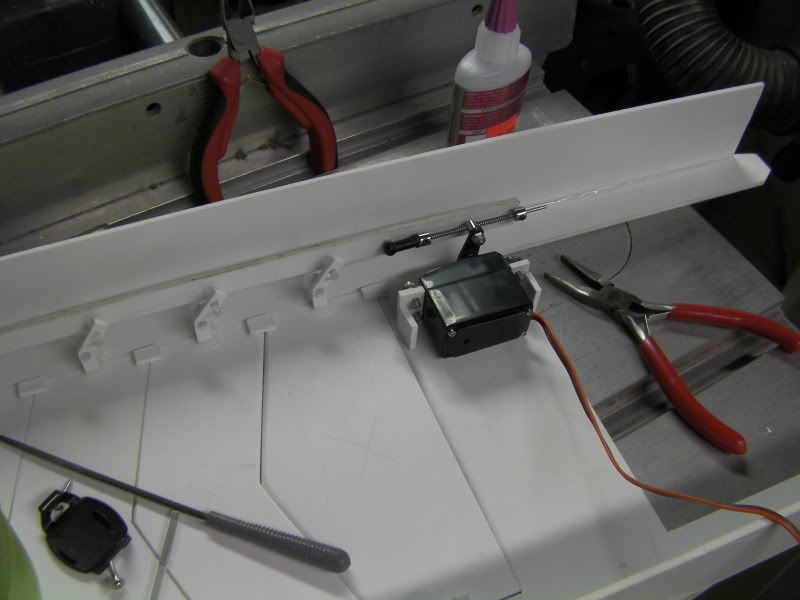
That's it for now while the glue sets up. Tomorrow or Thursday I should be able to hook this puppy up and test it! The linkage I used was from the forward/reverse servo from my old Traxxas T-Maxx. It's got 2 springs that should help keep the louvers shut as I can have the servo go a little past the point where they close and it'll hold them shut nicely.
Once it's all tested, all that's left is to finish gluing up the rest of it, make some mounts to mount it to the case, then bondo it up, sand it, and paint it!
Very nice. Looks like there's plenty of space for the larger servo too.
How come you moved to a ball linkage if you mind me asking? I don't think that was in the original design.
Top notch my friend. Looking great! I can't wait to see it in action.
Looking awesome! This is going to be one of the coolest PC + Arduino mods to date!
Thanks! Yes there should be plenty of space for it. The next step is to temporarily mount the 2 top fans and place this on and check all clearances and see how far open the louvers can go before they hit the fans, if they hit at all.Quote:
Originally Posted by x88x
TBH I never really had a set design in the beginning as far as hooking the servo the the actuator arm. I was planning on building the assembly, then mounting the servo wherever possible and using whatever linkage needed to make it work. I've got a ton of old R/C car stuff laying around (hence this servo and linkage) that made that part easy. I ended up needing the ball socket part because it was going to be nearly impossible to get the servo mounted exactly how it needed to be to hook it directly to the actuating arm. This way allows a little more flexibility in servo location as well as some give in the whole setup, which will be needed once I get the system up and running to properly calibrate the servo to the temp readings.Quote:
Originally Posted by crenn
The linkage was from the forward/reverse selector on the transmission and that particular servo was a hi-torque one that was used in the steering. I had to swap it into a new case and solder on new connector and wiring (R/C nitromethane fuel doesn't do plastic any good)
Thanks! Hopefully just another day or two when I've got a free sec to plug it in!Quote:
Originally Posted by OvRiDe
Thanks CJ!!Quote:
Originally Posted by Oneslowz28
Alright crenn I need you lol. I hooked it up to test it...and the servo spins the wrong way! I can't flip it as there's not enough room. It is possible to make the servo spin the opposite way? I tried reversing the settings in the code (from 5,175 to 175, 5 for servo position) and it didn't change anything. Any ideas? :? :think:
ok I figured it out. I set the computer off (no voltage to pin 7) setting to 180 instead of 50 (other end of servo). Then I placed the servo arm in it's correct position so the louvers will be closed when the servo is at this position. I then swapped the map=val figures to make the servo spin the other way and set the range of motion for the servo. These readings will need to be adjusted more once I get the system up and running, so I can set the ROM for the actual temps the case sees, not just ambient or in my mouth lol :D
Current code:
I was going to get some vid, but during the servo removal process I accidentally broke one of the servo mounts, so I had to re-glue it and it's setting now. Hopefully later tonight or tomorrow I can get it all back together and get a vid of it working!Code:// Controlling a servo position using a temperature sensor
// by Michal Rinott <http://people.interaction-ivrea.it/m.rinott>
// edited 5-12-2010 by Will Lyon to include base setting for servo if voltage not detected on pin 7
// edited again 7-4-2010 by crenn to simplify the code a little
// edited yet again 7-5-2010 by crenn to add features
// edited again 7-21-2010 by Will Lyon - recalibrated servo positions
#include <Servo.h>
Servo myservo; // create servo object to control a servo
//Constants
const unsigned char CONTROL = 7; // digital pin used to detect if the system is on or off
const unsigned char temps = 0; // analog pin used to connect the temp sensor
const unsigned char MAX_VAL = 10;
//Main global varibles
char trigger = 0; // varible used to store the control pin value
unsigned int val; // variable to read the value from the analog pin
unsigned int updateAvgtemp(){
static int history[MAX_VAL]={0};
static unsigned char lastHist=0;
static unsigned char numHist=0;
unsigned int temp=0;
unsigned char counter=0;
unsigned char arcount=0;
history[lastHist] = analogRead(temps);
if(numHist<MAX_VAL)
++numHist;
arcount=lastHist;
++lastHist;
if(lastHist>=MAX_VAL)
lastHist=0;
temp=0;
counter=0;
do{
temp+=history[arcount];
arcount--;
if(arcount>MAX_VAL)
arcount=(MAX_VAL-1);
counter++;
}while(counter < numHist);
return (temp/numHist);
}
void setup()
{
pinMode (CONTROL, INPUT); // sets the control pin to input
myservo.attach(9); // attaches the servo on pin 9 to the servo object
digitalWrite(CONTROL, LOW); // ensure internal pullup resistor is disabled.
}
void loop()
{
trigger = digitalRead(CONTROL); // read input of pin CONTROL and store it
if (trigger == HIGH){ // reads if pin CONTROL, if true, do this:
val = updateAvgtemp(); // read the value of the temp sensor (value with range of 1024)
val = map(val, 350, 700, 160, 80); // scale it to use it with the servo (value between 160 and 80)
myservo.write(val); // sets the servo position according to the scaled value
}
else {
myservo.write(180); // sets servo position to 180 if above statment is false
}
delay(125); // wait 25ms for the servo to move to it's new position and also 100ms until it gets the new value
}
Johnny Five Alive!!!
Ok well not Johnny Five, but my louvers are alive :D
After a little messing with the servo arm mounting, grinding down one of the servo mounts to clear the first louver, messing with the coding and a little silicone spray on the hinges, I'm happy to report it works!!!
Enjoy :D
Nice. Very smooth movement. :up:
WHOO HOOOO!!!!! That is kewl as all get out man! :up: rep too
Awesome!
okay... that deserves a massive + rep for pure awesomeness
Looking good! The easiest way to change the servo direction is this line when you're writing to the servo.
It does a small amount of maths before it writes it, but not too much. But your solution works fine as well.Code:myservo.write(180-val);
Looking Good!
Thanks! and thank crenn for the smooth movement!Quote:
Originally Posted by x88x
Thanks!Quote:
Originally Posted by msmrx57
thanks :DQuote:
Originally Posted by blueonblack
thank you sir! :banana:Quote:
Originally Posted by diluzio91
Thanks for the heads up :DQuote:
Originally Posted by crenn
thanks CJ!Quote:
Originally Posted by Oneslowz28
and once again a HUGE thanks to crenn. without his help sorting out the coding it wouldn't be nearly what it is now :D