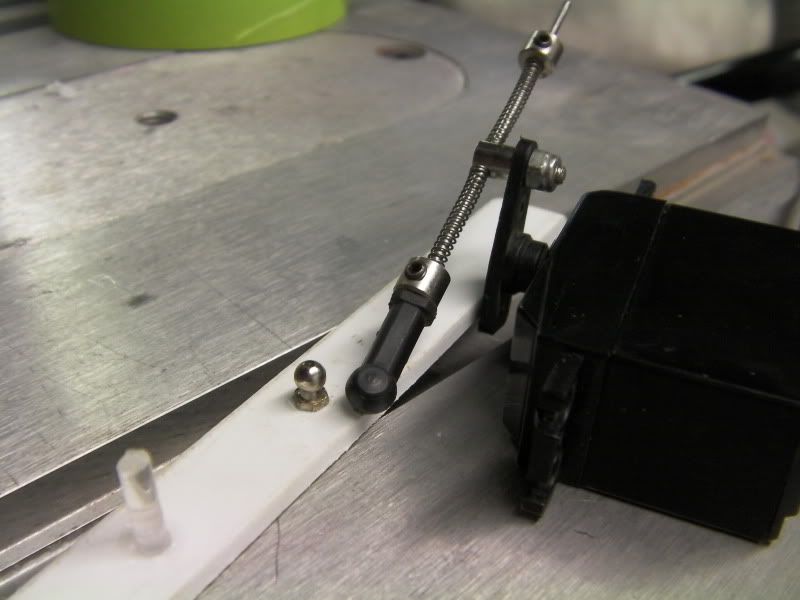
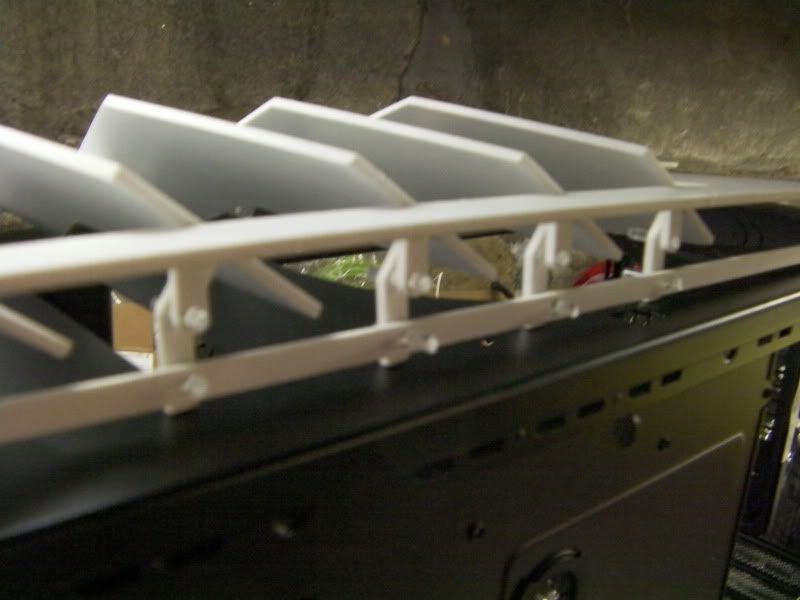
ok I figured it out. I set the computer off (no voltage to pin 7) setting to 180 instead of 50 (other end of servo). Then I placed the servo arm in it's correct position so the louvers will be closed when the servo is at this position. I then swapped the map=val figures to make the servo spin the other way and set the range of motion for the servo. These readings will need to be adjusted more once I get the system up and running, so I can set the ROM for the actual temps the case sees, not just ambient or in my mouth lol 
Current code:
Code:
// Controlling a servo position using a temperature sensor
// by Michal Rinott
// edited 5-12-2010 by Will Lyon to include base setting for servo if voltage not detected on pin 7
// edited again 7-4-2010 by crenn to simplify the code a little
// edited yet again 7-5-2010 by crenn to add features
// edited again 7-21-2010 by Will Lyon - recalibrated servo positions
#include
Servo myservo; // create servo object to control a servo
//Constants
const unsigned char CONTROL = 7; // digital pin used to detect if the system is on or off
const unsigned char temps = 0; // analog pin used to connect the temp sensor
const unsigned char MAX_VAL = 10;
//Main global varibles
char trigger = 0; // varible used to store the control pin value
unsigned int val; // variable to read the value from the analog pin
unsigned int updateAvgtemp(){
static int history[MAX_VAL]={0};
static unsigned char lastHist=0;
static unsigned char numHist=0;
unsigned int temp=0;
unsigned char counter=0;
unsigned char arcount=0;
history[lastHist] = analogRead(temps);
if(numHist=MAX_VAL)
lastHist=0;
temp=0;
counter=0;
do{
temp+=history[arcount];
arcount--;
if(arcount>MAX_VAL)
arcount=(MAX_VAL-1);
counter++;
}while(counter < numHist);
return (temp/numHist);
}
void setup()
{
pinMode (CONTROL, INPUT); // sets the control pin to input
myservo.attach(9); // attaches the servo on pin 9 to the servo object
digitalWrite(CONTROL, LOW); // ensure internal pullup resistor is disabled.
}
void loop()
{
trigger = digitalRead(CONTROL); // read input of pin CONTROL and store it
if (trigger == HIGH){ // reads if pin CONTROL, if true, do this:
val = updateAvgtemp(); // read the value of the temp sensor (value with range of 1024)
val = map(val, 350, 700, 160, 80); // scale it to use it with the servo (value between 160 and 80)
myservo.write(val); // sets the servo position according to the scaled value
}
else {
myservo.write(180); // sets servo position to 180 if above statment is false
}
delay(125); // wait 25ms for the servo to move to it's new position and also 100ms until it gets the new value
}
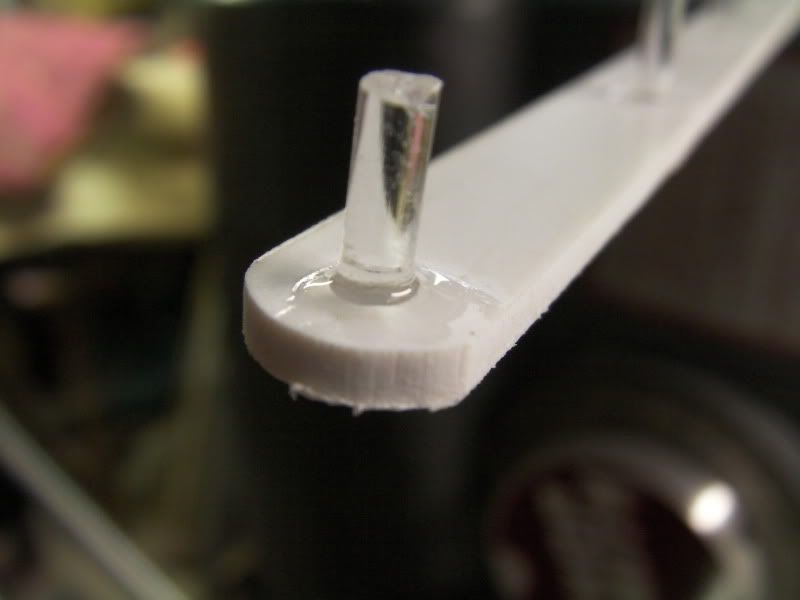
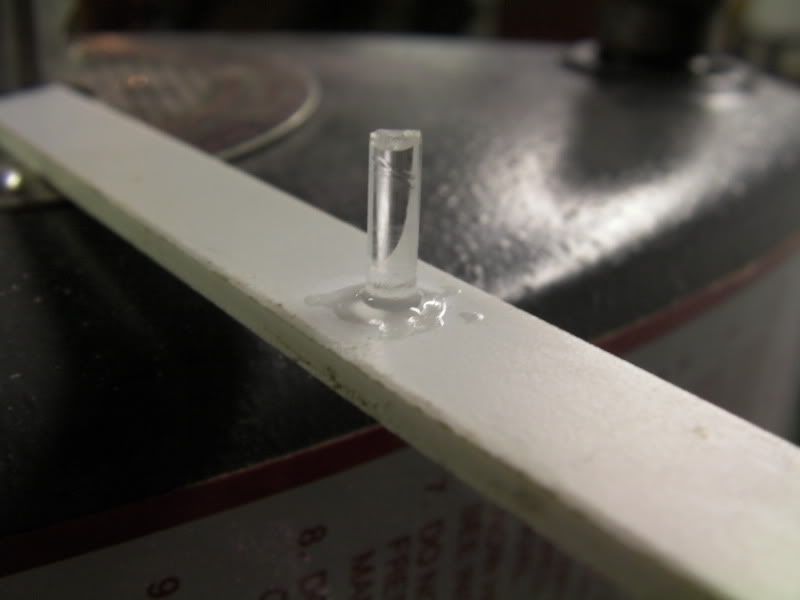
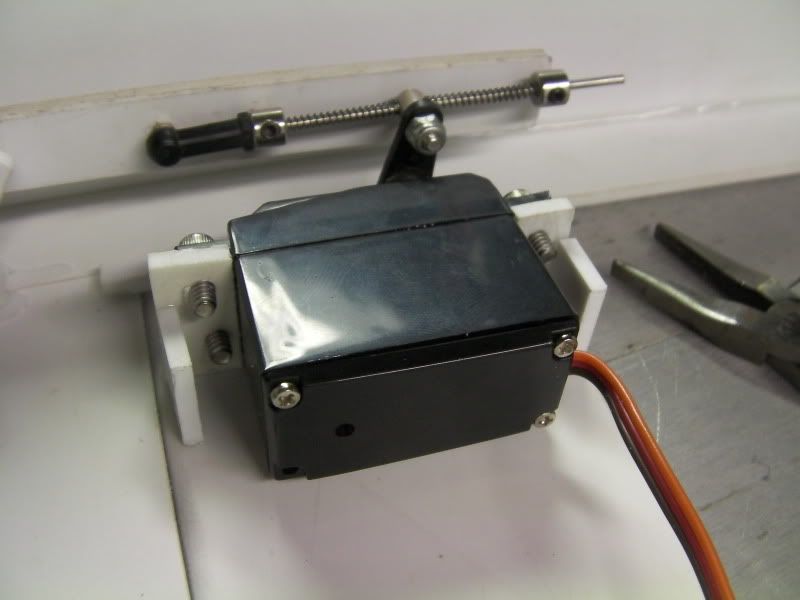
I was going to get some vid, but during the servo removal process I accidentally broke one of the servo mounts, so I had to re-glue it and it's setting now. Hopefully later tonight or tomorrow I can get it all back together and get a vid of it working!






Originally Posted by SXRguyinMA
 so it was seeing when it compiledCode:#define CONTROL 7which isn't what I wanted, the code will be update in 2 ticks to reflect that. Increase the number of samples to 20 (change MAX_VAL) and see if that helps.Code:const unsigned char 7 = 7;
so it was seeing when it compiledCode:#define CONTROL 7which isn't what I wanted, the code will be update in 2 ticks to reflect that. Increase the number of samples to 20 (change MAX_VAL) and see if that helps.Code:const unsigned char 7 = 7;





















 Farging AWESOME!!!!!!! That is sooooooo damn cool.
Farging AWESOME!!!!!!! That is sooooooo damn cool.  +rep for sure
+rep for sure