I mentioned in x88x's E-motorcycle build thread that I was working on my own small personal EV, so here's my progress so far.
As with many of my projects, I got most of the parts first and then found a project to do with them, rather than designing a project and then getting the parts for it. Here's the background of how I got the parts.
Five or six years ago, my school's robotics team used to do a competition called FIRST. Now, we no longer have the budget to do that competition, which means that we have tonnes of left over parts from the old robots, such as motors, motor controllers, gearboxes, and miscellaneous other parts like bearings and scrap metal. The teacher that is in charge of robotics wanted to clean out his classroom this year, so he let the current members of the team scavenge any parts we wanted from these old robots. So that's how I got most the core components of this EV for free.
The platform of the scooter is based around an old aluminum Royce Union kick scooter I had lying around. It is very similar to Razor style scooters, but with built in front and back suspension.
Here's the scooter I started with:
Here are the new 12.5" wheels. I was originally going to get 10.5" wheels, but I found these epic snowblower tires that fit the bigger wheels. These tires are what I will use for serious off road/snow.
And here's the basic layout. Yes, over a foot of clearance may be excessive.
To fit these massive new wheels, I had to completely rebuild the fork and rear suspension assembly. I built the rear wheel assembly out of a 4" x 1/4" aluminum bar I scavenged, some 2" x 1/4" aluminum bar, and some 3/4" U channel. I also bought some 6", 1500 lbs/in shock absorbers meant for mountain bikes.
Here are the two new shocks compared to the old one:
Here are the swing arm assemblies:
Attached to the scooter platform:
Here's where the wheel will go:
The fork had to be completely rebuilt as well. I started out by taking apart an old mountain bike fork. I removed the springs and dampers from the legs of the fork, and cut off the legs. In their place, I bolted pieces of 2" x 1/4" aluminum, to create a leading link type suspension. I built new shock absorbers out of steel tubing, steel rod, and the old springs from the mountain bike shocks.
MTB fork on the scooter:
DIY shock absorbers:
Fork:
With a wheel:
I cut dropouts for the wheel, so it can be removed easily (I did this on the back as well, but don't have pictures right now):
To make sure the handling was okay, I pushed it around the driveway a bit:
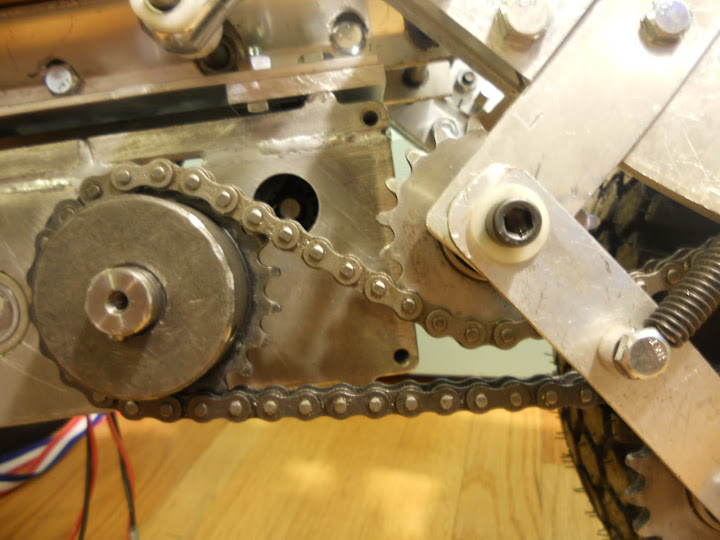
As you may be able to tell from the pictures above, I had to bend one side of the rear suspension assembly to get the rear wheel's sprocket to fit. I did this by heating the aluminum with a torch along the bend line while it was clamped in a vice.
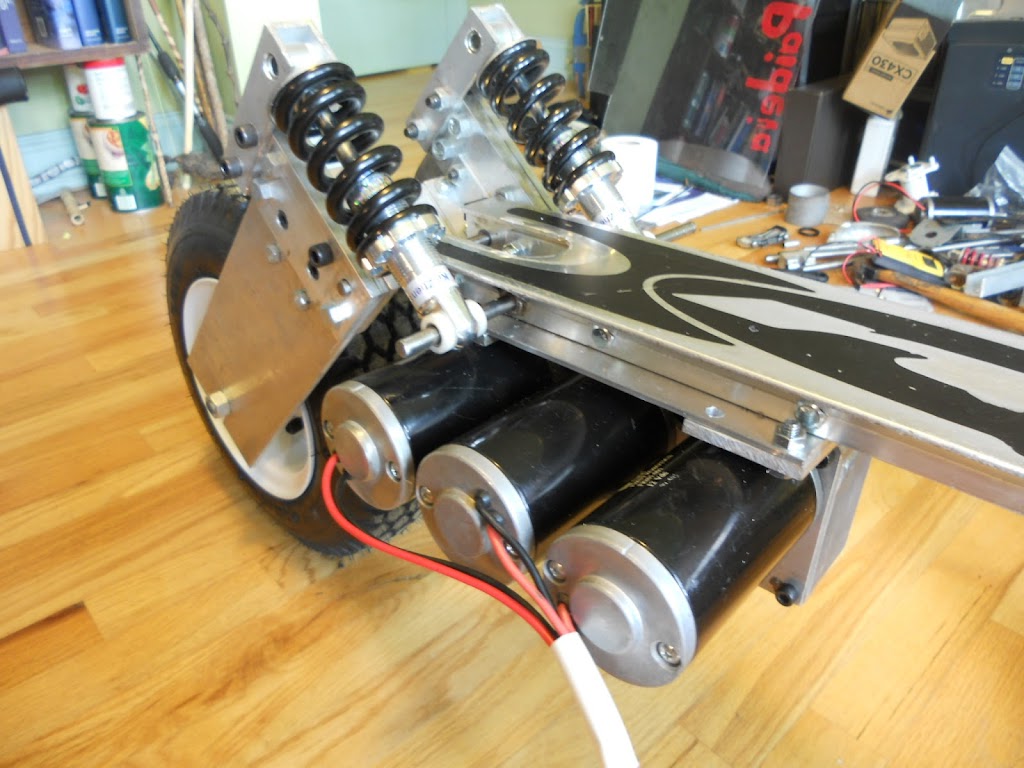
Now for the motor assembly. To power this vehicle, I am using 3 2.5" CIM motors, which are the standard for FIRST robotics. At 12V, which is the limit at FIRST, they only put out about 340 watts of mechanical power at their peak, which isn't very much. I'll be running them at a little over 18V, so I'm estimating that I'll get approximately 750 watts out of each motor (1.5x the voltage, 1.5x the current) That means I'll get a total of 3 horsepower. Now, I could buy a cheap brushless motor and get twice that for 1/5 the weight, but then I would have to actually buy the motor along with a motor controller, and from what I've read, hobby brushless motors/esc's are extremely finicky in personal EV applications. For motor controllers, I will be using 3 IFI Victor 884 controllers. Although these are listed as being max 15V 40A controllers, they are in fact underrated. They are identical except for the microcontroller to the older Victor 883 controllers, which are rated at 24V and 60A. So they should be fine at 18V
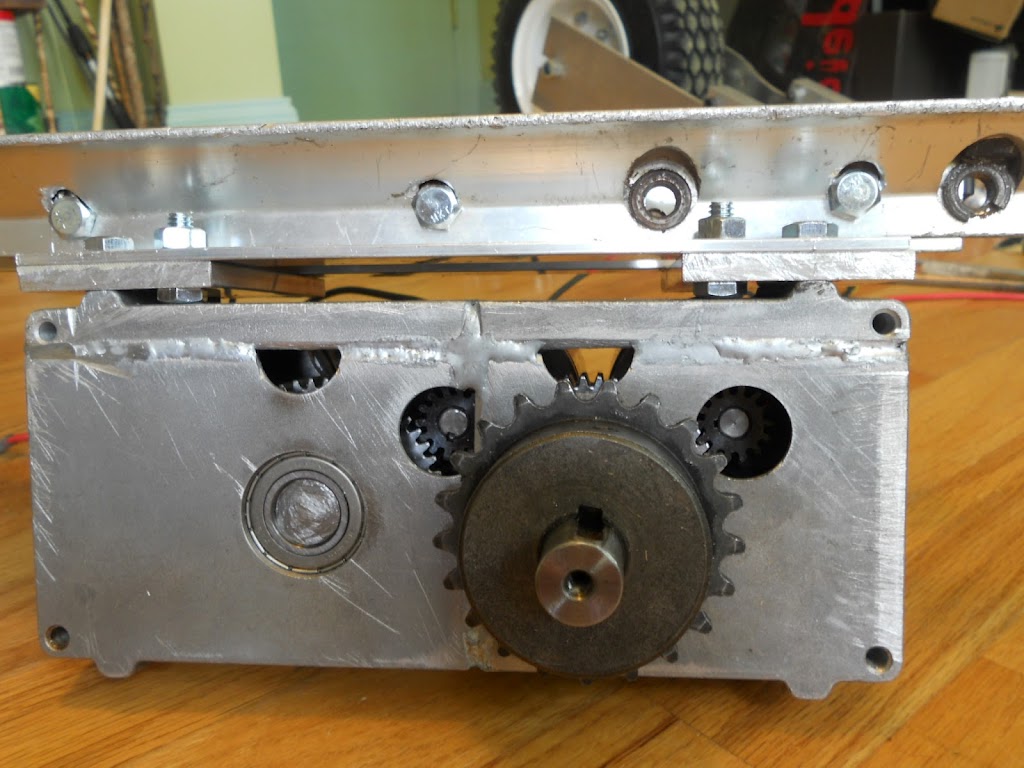
Since CIM motors are high speed (about 450 rpm/volt), I built a gear reduction out of two gear boxes I scavenged from school. The gearboxes were originally 2 stage, but I removed the second stage, as there will be additional reduction from the chain drive. The original gearboxes were designed to hold 2 motors each, but since I am using 3 motors, I chopped up the gearboxes and spliced them together into a 3 motor 14:50 reduction. I fastened everything together with this stuff called Alumaweld, which is basically a brazing material that works on Aluminum.
Here's the gearbox:
Here is the inside. I still need to buy one more 14 tooth motor gear:
The whole unit:
That's all for now.

























 Reply With Quote
Reply With Quote